
تقديم
|
الهدف وراء "سلسلة ابدأ من حيث انتهوا" هو تزويدكم بتفاصيل المشاريع الحالية حتى يتسنى لكل مهتم أن يشمر على ذراعيه ويبدأ بصنع ما يستفيذه منها، وحتى لا يبقى البعض منا يرى الفجوة بيننا وبينهم. لقد قام الروس بسرقة تصاميم القنبلة النووية وبالتالي أصبحوا قوة عسكرية قوية أيضا. ففي هذه السلسلة لا نتطرق إلى التصميم فحسب بل نأخذك في كثير من التفاصيل حتى ترتسم الصورة كاملة في ذهنك. وإنجاز مثل هذا المقال العلمي تطلب مني وقتا وجهدا كبيرين في الحقيقية. أرجوا أن تستفيدوا منه. |
الهدف
|
عندما تريد أن تبدأ أي مشروع دنيوي كان أو أخروي فقم بوضع هدف أمامك حتى تعمل من أجله. فإن استعصى عليك إيجاد الهدف فقل وبكل بساطة أنك تريد التسلية عن طريق صنع هذه الآلة لا غير.
الهدف وراء إنشاء روبوت الكلب الكبير هو كالتالي:
|
|
إنجاز روبوت قادر على التحرك والتنقل إلى أي مكان يمكن للإنسان أو الحيوان التنقل إليه |
|
|

هذا الروبوت سيقوم بمساعدة الجنود في مهماتهم العسكرية عن طريق حمل أمتعتهم ومرافقتهم أينما ولوا وحيثما ارتحلوا.
أمثلة








استعراض للروبوت
التفكر
| الكثير منا يعلم أن الكلب مزود بحاسة شم خارقة والوفاء لصاحبه من أسمى الصفات التي تميزه. ولعل عمل بحث علمي حول محاكاة حاسة الشم لدى الكلب قد تكون من بين الاختراعات المدهشة تأتي بها أنت أيها القارئ. ولعل دراسة صفة الوفاء لدى الكلاب لم يتطرق إليها أحد بعمق لحد الآن، فلربما قد يكون لها نفع لبعض الناس حتى يتعلموا الوفاء. وهذه إشارة مني إلى كل من له شغف حول دراسة سلوكيات الحيوانات والتفكر فيها. |




|
أما المشي أو الجري لدى الكلاب فهو آية أخرى من آياته. إذ لدى كلاب الصيد المسماة بالسلوقي طريقة جري متميزة وسرعة فائقة تبلغ … كليومترا في الساعة. وروبوتنا اليوم الذي نتحدث عنه يركز على هذه الميزة لدى الكلاب فقط على ما سيبدوا لكم. فالكلب إذا ضرب من جنبه فإنه قد لا يسقط على اﻷرض بسهولة، كذلك وأن الكلب قد يمشي على معظم أصناف اﻷرض من تربة ورمل وصخور وما إلى ذلك مثله في ذلك مثل العديد من الحيوانات اﻷخرى. |
|
وإذا كان عندك وقت، أنهِ المقال أولا ثم عد إلى هذا الوثائقي وشاهده ليس لمجرد المتعة فقط بل بعين تحليلية ثاقبة، إنك مخلوق قوي وبإمكانك فعل الكثير: |
هندسة الروبوت
التصميم العام
|
|
|
|
|
هذا هو التصميم العام لهيكل الروبوت. ومن الواضح أنه لا يحاكي الكلب تماما إلا أن البداية دائما ما يستحسن أن تكون سهلة. وعند معاينة نجاحك اﻷول ستقوم بتحسين آليات صنعك ولك في الكثير من الاختراعات المثل على ذلك. سنقوم فيما يلي بشرح آليات الروبوت كل على حدة حتى يتسنى لك البدء بمشروع مثله أو أحسن منه. ولا تنتظر منا أن نزودك بكل شيء هنا، ولكن ما قل ودل. |

الحاسوب
|
لو اطلعت على بعض المقالات في الموقع "اصنعها” ستجد أننا تكلمنا كثيرا عن برمجة الروبوت باستعمال البطاقات البرمجية كبطاقة Arduino مثلا. لكن عندما تريد أن تنجز مشروعا ضخما كهذا الروبوت أو مركبة فضائية مثلا، فالحاسوب الذي بين يديك اﻵن كاف جدا لتولي هذه المهمة. الحاسوب الذي استعمل في انشاء هذا الروبوت ربما يكون أقل قدرة وسرعة من حاسوبك أنت...
|
|
|
الصورة جانبه تمثل الحاسوب الذي استعمل لتدبير مهام الكلب الكبير. ويتميز بالتالي: معالج من فئة Pentium 4 PC/104 هو اسم اللوحة الاليكترونية اﻷم نظام تشغيل صغير يشبه UNIX يسمى بـ QNX البرمجة باستعمال اللغة ++C
قد يأخذك العجب في شكل هذا الحاسوب، لكن دعني أسألك سؤال: مالذي ستحتاجه من الشاشة ولوحة المفاتيح عندما تريد أن تزود الروبوت بحاسوب؟؟ ستزيد في وزنه فقط! وبالتالي، يمكنك الاستغناء عنهما والاعتماد على اللوحة اﻷم الاليكترونية داخل الحاسوب مع بعض التعديلات إذا تطلب الأمر. |
|

الدوال اﻷساسية التي تمت برمجتها باستعمال اللغة ++C تتمثل في المحاور التالية:
التحكم : أي التحكم بطريقة المشي لدى اﻷرجل.
الاستشعار: أي التعامل مع مختلف المستشعرات الاليكترونية التي تمثل مختلف الحواس لدى الكلب الكبير.
جمع البيانات
الاتصالات
توزيع الكهرباء لمختلف أجهزة الكلب الكبير.
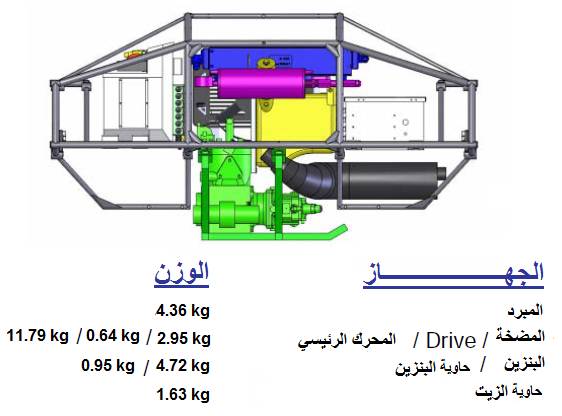
المحرك الرئيسي
|
|
||
|
يقوم المحرك بقيادة المضخات الهيدروليكية التي بدورها تقود محركات اﻷرجل.
اسم المحرك: 15-HP go-kart engine اسطوانة واحدة ذي شوطين القدرة: 9000 دورة في الدقيقة نظام التبريد بالماء يبدأ بالعمل عند تزويده بشحنة كهربائية في البداية |
|
|



اﻷرجل
|
|
|
|
قد تظن أن برمجة الروبوت على الرؤية والتعرف على اﻷشخاص والتكلم بجمل مثلا هي الأصعب في عالم الروبوتات... لكن في رأيي فأنت على خطأ... ﻷن هذه الأخيرة لم تصبح شيئا فائق التعقيد بعدما تمت دراستها في مجال الذكاء الاصطناعي، بل وقد تجد في الشبكة العنكبوتية دوالا مبرمجة وجاهزة يمكنك أن تضمها إلى روبوتك أو حاسوبك من أجل القيام بهذه العمليات...
|
|
|
لكن اﻷرجل، وما أدراك ما اﻷرجل. إذا اضطلعت على العديد من الروبوتات ذوات اﻷرجل فستجد أنها هي النقطة الحساسة في الروبوت. ولك في الروبوت أسيمو عبرة في ذلك....
فأنا أنصحك إن كنت تريد أن تبدأ بصنع روبوت، عليك البدء بتصميم أرجل بطريقة ميكانيكية كالمثال الذي تراه في الصورة جانبه. وهذا سيجرك وبلا شك إلى التفكر في خلق الله، وهنا قد تفهم عندما يخاطبك خالقك ويقول {وَكَأَيِّنْ مِنْ آَيَةٍ فِي السَّمَاوَاتِ وَالْأَرْضِ يَمُرُّونَ عَلَيْهَا وَهُمْ عَنْهَا مُعْرِضُونَ}... والآية تعني المعجزة...
رجل الكلب مثلها مثل الكثير من الحيوانات تتكون من قدم وساق وفخذ وورك. ولو أمعنت النظر فيها ستجد أنها تختلف عن رجل الانسان في تموضع الركبة والرسغ وما إلى ذلك. |
 رجل كلب روبوتي إيطالي |
|
أرجل الكلب الكبير مزودة بمحركات سيرفو و محركات هيدروليكية (هيدروليكية أي تعمل بالهواء أو بسائل)
لاستعمال المحركات الهيدروليكية مقصد معين ألا وهو امتصاص الصدمات الناتجة عن ضربات اﻷرجل على اﻷرض عند التنقل. وهذا يعطي للروبوت بعضا من المرونة في التحرك، وكذلك تسلم أجزاءه اﻷخرى من التلف جراء الاصطدامات.
كما أن كل رجل مزودة بمستشعرات التماس (أو القوة) ترسل إشارات إلى الحاسوب حالة الرجل عند التنقل، أي هل هي تلامس اﻷرض أم لا؟ هذه المعلومة البسيطة تساعد الحاسوب على التحكم في تحرك مختلف اﻷرجل حتى تتحق طريقة المشي بشكل سليم.
من بين المهام التي يجب أن يأخذها الحاسوب في عين الاعتبار ألا وهي المساحة الضيقة التي تفصل بين اﻷرجل ويجب على خوارزم المشي أن تحول دون حدوث تصادم بين الأرجل عند الجري أو المشي. |
 |
|
قبل الاقدام على صنع الرجل، لعل إنشاءها باستعمال برامج متوفرة على الشبكة العنكبوتبة سيكون أحسن ﻷن هذا سيخولك الى امتحان أداءها والتأكد من قوتها قبل أن تشرع في صنعها. بهذه الطريقة يمكنك أن تقضي وقتا أقل في صنعها.
من بين هذه البرامج نذكرAutoCAD وSolidWorks و Google SketchUp و ….
التصميم جانبه هو تصميم رجل الكلب الروبوتي الايطالي الصنع الذي سنتطرق له أسفله. |
|


المستشعرات الإليكترونية
|
|
|
حواس أي روبوت تمثل بالمستشعرات الإليكترونية. والكلب الكبير مزود بعدة مستشعرات اليكترونية أهمها مستشعرات مثيتة على اﻷرجل للمساعدة على المشي ومستشعرات الرؤيةالتي تخوله تتبع صاحبه الجندي مثلا.
لنا سلسلة خاصة لبرمجة المستشعرات الإليكترونية تساعدك على إنجاز روبوت متقدم تجدها في ركن برمجة الروبوت.
نستعرض فيما يلي أهم هذه المستشعرات مع بيان مهامها بشكل مبسط: |

|
LIDAR
نظام الليدار يخول الروبوت من تتبع صاحبه الجندي من دون أن يحتاج هذا الأخير من قيادته.
يبقى على الجندي أن يلبس بذلة تضم قطعا معدنية أو اليكترونية ليتعرف عليها المستشعر LIDAR وبالتالي يمكن للحاسوب من قيادة الروبوت لتتبع صاحبه مع الحفاظ على مسافة محددة فاصلة بين الجندي والروبوت. |
|

|
Stereo vision
مزود بثلاث مستشعرات من هذا النوع. تخوله من تفادي العوائق وتحديد المنحنى الأرضي. |
|

|
الجيروسكوب Gyro
مزود بثلاث جيروسكوبات لحساب نسبة الدوران وثلاث جيروسكوبات لحساب التسارع الخطي.
يستعمل الجيروسكوب لحفظ توازن أو اتجاه الروبوت.
كما أن جهاز الآيفون مثلا مزود بجيروسكوب وبالتالي يمكن تغيير طريقة عرض الشاشة عندما تميله مثلا. |
|
|
مقياس الجهد الانزلاق الخطي Linear Pot
مزود بـ 16 مستشعرا من هذا النوع أربعة في كل رجل. واحد في الركبة وآخر في الرسغ واثنين في الورك.
|
|
|
Load Cell
مزود بـ 16 مستشعرا من هذا النوع متموضعة في اﻷرجل تراقب المحركات وقوة كل رسغ حيث تقوم بتحويل القوة إلى إشارة كهربائية. |
|
|
مستشعر التيار Current sensor
يقوم بقياس التيار ويرسل إشارة تعبر عنه. مزود بـ 16 من هذا النوع. |
|
|
مستشعر درجة الحرارة Temperature
لقياس درجة حرارة المحرك الرئيسي والزيت. مزود بـ ثلاثة من هذا النوع. |
|
|
مستشعر التدفق Flow
لحساب نسبة تدفق السوائل (وهنا نعني الزيت) مزود بأربعة. |
|
|
مستشعر الضغط Pressure
يمكن استخدام هذا المسشعر لقياس ضغط الغازات أو السوائل. واستعمل اثنين منه في الكلب الكبير لقياس ضغط الزيت.
|
|
|
التحكم Governor
مزود باثنين منهذا المستشعر لمراقبة المحرك الرئيسي والجهد الكهربائي للبطارية. |
|








طريقة التحكم بالروبوت
|
|
|
يقوم الجندي (قائد الكلب) بلبس بذلة مجهزة بأدوات للتحكم بالروبوت والتواصل معه أيضا. والمسألة سهلة هنا إذا تمت إضافة جهاز اتصال كـ WiFi أو الأشعة الحمراء أو البلوتوث أو ما شابه ذلك... |

نموذج الكلب الصغير LittleDog
|
هو النموذج المصغر للكلب الكبير، ويمكنك مشاهدة أهم خصائصه في الفيديو التالي: |
 |
 |
نموذج الكلب الكبير BigDog
|
طوله 91 سنتمتر وارتفاعه 76 سنتمتر ويزن 110 كيلوغراما. تقريبا بحجم بغل صغير. يستطيع المشي على أرض وعرة بسرعة 6.4 كيلومترا في الساعة، وقادر على حمل 150 كيلوغراما من الأمتعة، وقدرة على تسلق عقبة مائلة بـ 35 درجة كأقصى حد. |
 |
نموذج الكلب العملاق LS3
|
يراد من هذا النموذج أن يتحقق على أرض الواقع في سنة 2012. من المفترض من هذا النموذج القدرة على حمل 181.8 كيلوغراما من الأمتعة وكذلك العمل بدون إصدار صوت عند الحاجة مع بعض المميزات الأخرى. |
|

النموذج HyQ الإيطالي
|
ابتدأ البحث فيه في ربيع سنة 2007 في المعهد الإيطالي للتكنولوجيا. وكان الهدف هو إنشاء روبوت رباعي الأرجل قادر على التحرك ديناميكيا كالجري والقفز والتحرك على أرض وعرة.
تم امتحان عمل أو رجل صنعت بشكل مكثف بين سنة 2008 و2009 (ولو تتذكر هذا ما قلناه آنفا عن صعوبة الرجل). وأول نموذج من هذا الروبوت تم اصداره سنة 2010. وكما جرت العادة، بعد النجاح الأول نقوم بتحسين أداء صنعنا ميكانيكيا وبرمجيا كذلك. |
|

وهاك مختلف النماذج لهذا الروبوت:









يمكنك أن ترى مختلف وظائفه في هذا الفيديو:
تحليل
|
للكلب الكبير والنموذج الإيطالي عدة مزايا من جري وقفز والمشي على أرض وعرة وما إلى ذلك. لكن إذا ما قارنت بالكلب الحقيقي فستلاحظ أن الفرق شاسع جدا جدا. فمن خلال ملاحظتي لمميزات الكلب الآلي تبين لي ما يلي:
l إذا ما حدث وانقلب الكلب الآلي على ظهره بفعل حادث مثلا، فيبدوا أنه لن يستطيع الوقوف تلقائيا إلا بمساعدة الجنود. وهذا سيستعصي على الجنود لثقل وزنه أيضا. l الشيء الآخر وهو إذا وضع الكلب الآلي في الماء فيبدوا أنها ستون نهايته إذا تسرب الماء إلى أجزاءه الإليكترونية، l وماذا عن مصادفته لنهر أو بحيرة أو بحر مثلا، فسيغرق لا محالة إذ أنه لا يستطيع السباحة عكس الكلب الحقيقي.
ليس من الضروري الجري وراء إنشاء كلب آلي كما يفعلون، لكن جائتني فكرة في تطوير حصان آلي، حيث أن الحصان استغدم عبر مر العصور في الحروب وهو عكس الحيوانات الأخرى لا يهاب المعارك مهما حميت واشتد وطيسها. وبهذا ربما نرجع إلى العصور الوسطى باستخدام أحصنة في الحرب لكن هذه المرة آلية الصنع ههههههه.
كما يقال أن التشيتا هي أسرع حيوان بري، وأقدم لك نموذجا مرسوما بالحاسوب عسى أن تطور لنا نموذجا حربيا يقوم على مميزاتها، ودعنا نفرح بك وباختراعك عما قريب إن شاء الله. |



أقول لك هذا لأشير لك بمميزات تضيفها أنت إن قررت صنع روبوت يشبهه أو يظاهيه. أوليس هذه السلسلة مسماة بابدأ من حيث انتهوا!!!
تأليف
محمد السهلي
{jumi [*3]}
المراجع
- http://www.bostondynamics.com/robot_littledog.html
- http://en.wikipedia.org/wiki/BigDog
- http://www.bostondynamics.com/robot_bigdog.html
- http://ar.wikipedia.org/wiki/%D8%AC%D9%8A%D8%
- http://en.wikipedia.org/wiki/Flow_sensor
- http://en.wikipedia.org/wiki/Gyroscope
- http://en.wikipedia.org/wiki/Pressure_sensor
- http://ar.wikipedia.org/wiki/%D9%85%D8
- http://ar.wikipedia.org/wiki/%D9
- http://ar.wikipedia.org/wiki/
- http://en.wikipedia.org/wiki/Legged_Squad_Support_System
- http://www.semini.ch/research/hyq-robot/
- http://www.iit.it/en/advanced-robotics/projects/hydraulically