
تقديم
|
يعرف هذا الروبوت باسم Trimet Symet أي المتماثل الثلاثي في أوساط الروبوتات الشمسية. يضم هذا الروبوت دارة تعرف كثيرا باسم "دارة التحكم الشمسي" (أي voltage-tiggered (Type 1) Solar Engine). هذا الروبوت عبارة عن آلة متماثلة الأجزاء. وهو تطبيق مباشر لهذه الدارة كما أنه سهل الإنجاز أيضا. |
|
|

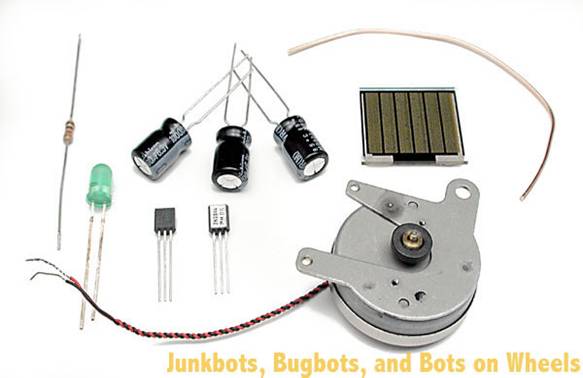
الأجزاء الرئيسية
|
|
||
|
العربية إنجليزية فرنسية |
الكمية |
القيمة أو الصيغة |
|
خلية شمسية Solar cell Cellule photovoltaïque |
1 |
37x33mm, Polycrystalline |
|
محرك الكاسيط Cassette motor Moteur d'un Cassette |
1 |
من Walkmanأو قارئ أشرطة آخر |
|
زناد الجهد Voltage trigger |
1 |
1381-G |
|
مقحل (ترنزستور) Transistor |
1 |
2N3904 (”3904”) NPN |
|
1 |
2N3906 (”3906”) PNP |
|
|
مقاومة Resistor Resistance |
1 |
2.2k |
|
مكثف Capacitor Condensateur |
3 |
4700µF |
|
سلك كهربائي Wire Cable Electrique |
2 |
أحمر وأسود |
|
مساكة معدنية للورق Paper Clip |
1 |
|
الدارة الكهربائية للروبوت
|
|

الخطوة 1: دارة التحكم للمحرك الشمسي
|
سنقوم بتشكيل هذه الدارة بكل حرية. ويمكن تلحيم هذه المركبات بعضها ببعض وإعادة تفكيكها بكل سهولة إذا كان هناك مشكل. |
|
|
قم بتوجيه الترنزستورين لبعضهما البعض. ثم قم بتلحيم قاعدة (في الوسط) الترنزستور 3904بالجامع للترنزستور 3906 (المربط الذي على اليمين).
قم الآن بتعويج باعث وجامع الترنزستور 3904لتشكيل زاوية 90درجة، وقم بتعويج قاعدة الترنزستور 3906أيضا. ثم ألحم طرفي المقاومة 2.2kبجامع الترنزستور 3904وقاعدة الترنزستور 3906.
لم يبق لنا الآن إلا إضافة زناد الجهد 1381 (أي voltage trigger). قم بوضعه بالجانب الأيمن للترنزستور 3906وموجها بنفس الطريقة أيضا. قم بتلحيم مبرطه الثالث (اليمين) بباعث الترنزستور 3904ومربطه الأول (اليسار) بجامع الترنزستور 3906. وفي النهاية ألحم المربط الثاني (في الوسط) بباعث الترنزستور 3906. |
|
|
|
|
|
|
|



الخطوة 2: تحضير المحرك
|
قم بإزالة كل العوالق على المحرك حتى يبقى لنا فيه الرأس والجسم والمربطين. |
|

الخطوة 3: تلحيم المكثفات
|
قم بتثبت الأقطاب السالبة للمكثفات على المحرك واجعل بين كل اثنين زاوية 120درجة.
أما الأقطاب الموجبة فقم بليها نحو الأعلى بزاوية 90درجة. |
|

الخطوة 4: إضافة دارة المحرك الشمسي
|
قم بمركزة دارة التحكم للمحرك الشمي في قاعدة المحرك ثم ألحمها كالتالي: صل باعث الترنزستور 3904بقاعدة المحرك والتس تشمل الأقطاب السالبة للمكثفات الثلاث أيضا.
يمكن أن نقول هنا بأن قاعدة المحرك تمثل القطب السالب في الدارة. |
|

الخطوة 5: إنشاء وتثبيت حلقة الطاقة
|
نحتاج الآن إلى صنع حلقة. قم بجلب مساكة معدنية للورق ثم شكل منها حلقة دائرية كما ترى في الصورة جانبه.
ستكون هذه الحلقة تمثل القطب الموجب للدارة، ومن هنا جاءت تسميتها بحلقىة الطاقة. |
|
|
قم بتلحيم الأقطاب الموجبة للمكثفات الثلاث بالحلقة الدائرية. |
|
|
إذا أمكنك أن تصل باعث الترنزستور 3906وتلحمه بحلقة الطاقة فافعل، وإلا فاستعن بسلك يوصلهما معا. |
|



الخطوة 6: تثبيت الخلية الشمسية
|
إذا لم تكن الخلية الشمسية عندك مزودة بأسلاك كهربائية فضفها إليها وقم بتعليم القطب الموجب والقطب السالب.
قم بإيصال القطب الموجب للخلية بالحلقة والقطب السالب بقاعدة المحرك التي تمثل القطب السالب للدارة.
أما المحرك فقم بإيصال قطبه الموجب بالنقطة التي تلتقي فيها المقاومة 2.2kوجامع الترنزستور 3904. |
|

الخطوة 7: اختبار المحرك الشمسي المتماثل
|
قم الآن بوضع الخلية الشمسية فوق الحلقة وقن بتثبيتها حتى لا تقع على الأرض. بعد حوالي 10ثواني سيقوم الروبوت بالحركة.
إذا تم كل شيء على ما يرام فمبروك عليك. وإلا فقم بإعادة فحص الدارة. |
|
|
نموذج آخر لنفس الروبوت. |
|


تأليف
تأليف: Gareth Branwyn
ترجمة بتصرف: محمد السهلي
{jumi [*3]}
المراجع
http://makeprojects.com/Project/Trimet-Solar-BEAM-Top/99/1#.UIzS8MXMiXd
http://junkbots.solarbotics.com/sample_chapter/sample_chapter.htm