
تقديم
|
|
أبدأ بقولي ببسم الله الرحمان الرحيم وأكمل وأقول أنه بالرغم من أن الروبوتات المائية غير متطرق لها بشكل أكبر في عالم التقنية فإننا لدينا بحار شاسعة آهبة بجبال وصحارى بحرية وشعوب مرجانية تنتظر استكشافـها. لذا، فإن التركيز على استكشاف هذه المناطق الوعرة والخطرة على الإنسان يتطلب منا تصميم روبوتات عوامة قادرة على الغوص والتعامل مع العوالم البحرية عن طريق التحكم بـها عن بعد. |
|
|
|
|
روبوتنا المائي الذي نتحدث عن طريقة تصنيعه اليوم قادر أن يغوص حوالي 18مترا أو أكثر. |
|


لا بد من قرائته
|
هذا المقال عبارة عن ملخص فقط لصناعة هذه الغواصة الروبوتيةـ ومن أجل إنجاز جميع الأجزاء ننصح بقراءة المقالات التالية التي تجدها كلها على موقع اصنعها: المحركات – محرك الغواصة والماء (تقنية الإقتران المغناطيسي) المحركات – محرك الغواصة والماء (تقنية الحلقة) الغواصات – عزل الكاميرات والمصابيح والأسلاك من الماء الغواصات – صنع اليد الروبوتية للغواصة (النموذج 1) الغواصات – صنع اليد الروبوتية للغواصة (النموذج 2) الغواصات – بطاقة متحكمة بالغواصات الروبوتية |
استعراض للروبوت




التصميم



|
عند انشاء اي روبوت نبدأ دائما بـالتصميم، وحيث أن هذا الـروبوت غواص تحت الماء لذا فان تصميمه يختلف قليلا عن الـروبوتـات الشائعة. فمثلا، لكي نحافظ على الروبوت المائي ثابتا وسط الماء يجب ان نصممه بطريقة ما حتى يصبح ثقيلا بالأسفل وندعمه بـخزانات للطفو بالأعلى. |
الاطارات
|
|
رقم 1يشير إلى غطاء زجاجي حامي للأنبوب حتـى يحول دون تسرب الماء بالداخل. |
|
|
رقم 2 يـشير الى الأنبوب الحافظ المحتوي على البطارية.
أما الـرقم 3 فيـشير إلى توصيلة متقنة لمنع تسرب الماء إلى الاسلاك وسنتحدث عن هذه المسألة بالتفصيل في الفقرات القادمة.
رقم 4هو سلك الانارة وسيتم توصيله لاحقا.
رقم 5هي سلك (كابل) للطاقة الكهربائية. |
|
|
رقم 6 يمثل هيكل (عظام) الروبوت وهو مصنوع من مادة تسمى البولي فينيل كلوريد وعرض المقطع هو نصف بوصة.
ملاحظة 1: يمكنك استخدام مادة بلاستيكية أخرى بالطبع.
ملاحظة 2: يمكنك معرفة المزيد من التفاصيل عن مادة البولي فينيل كلوريد بالضغط على الرابط التالي: Wikipedia (PVC) |
|
|
رقم 7هو جزء مانع التسرب ويدعي بالإنجليزية 5200Marine sealant |
|
|
رقم 8 يمثل اهم جزء في الروبوت وهي أسطوانة سوداء ستضم الدارة الإلكترونية والاجزاء الرئيسية الأخرى. |
|
|
رقم 9 هو بالتفصيل شكل فتحة توصيل الاسلاك داخل الأسطوانة السوداء التي سـتحمل الدارة الإلكترونية. ويتم سد الاماكن القابلة لتسريب الماء بمادة السيليكون أو مادة أخرى لمنع اي تسرب داخل الاسلاك مما قد يقوم بتخريب الدارة الكهربائية وهي تحت الماء.
رقم 10 يمثل فتحة اخرى لم يـكتمل توصيها بعد وسيتم تـمرير اسلاك الطاقة من خلالها. |
|
سنتحدث الان بشيء من التفصيل عن هذه الاجزاء وكيفية صنعها:
سنستخدم انابيب من نوع مركب الأكريلو نيتريل بيوتادايين إستيرين ABS. هذه الانابيب تستخدم في الصرف الصحي ورقمها 40.
2- عند لصق هذه الانابيب معا تأكد من ان تستخدم الـغراء المذيب الذي يستخدم في لصق وتثبيت هذا النوع من الانابيب. بالنسبة لأنابيب البولي فينيل كلوريد فان اللاصق العادي لن يعمل معها جيدا ويمكن ان يؤدي إلى تسريبات.
3- اما الأسطوانة السوداء الرئيسية فسنقوم بإغلاقها من الامام بهذا الزجاج الواقي ومن الخلف ايضا باستخدام براغي حتى إذا احتجنا لعمل اي تصليحات للدارة الإلكترونية بالداخل نقوم بفتحها مرة اخرى.
|
|






الداسرات "وهي المسئولة عن الحركة تحت الماء"
|
|
تعتبر الداسرات اهم جزء لتحريك المركبة. في هذه المرحلة سنستخدم اربع مـروحات: أ- اثنان منها مخصصة للدفع للأمام والخلف والدوران، ب- الاثنان الباقيان مخصصان للـطفو للأعلى والغوص للأسفل.
|
|
|
سنحتاج لحاوية أو أسطوانة مناسبة للمحرك. |
|
|
وسنحتاج لجزء معدني ليربط رأس المحرك بالمروحة. |
|
|
يجب ان يكون الربط محكما لمنع وصول أي ماء للمحرك. |




الإستكشاف
|
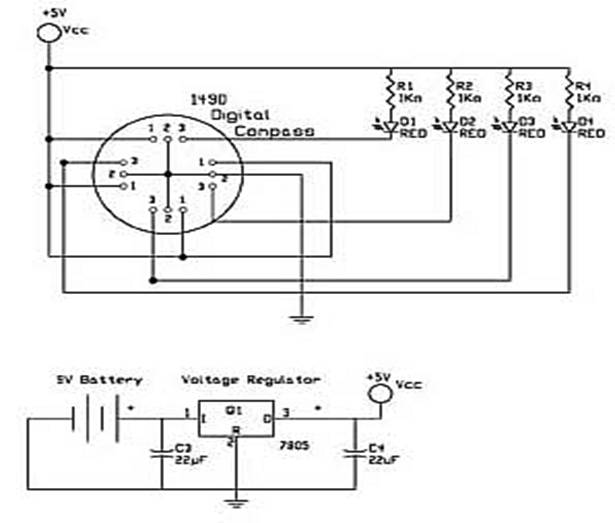
في هذه المرحلة سنتعرف في اي اتجاه يتحرك الروبوت ولكي نعرف هذا يجب ان نوصل معه اولا بوصلة إليكترونية لتحديد الاتجاه. في حالتنا هذه استخدمـنا بوصلة من نوع Dinsmore 1490. |
|
|
|
* الرقم 1يشير إلى الاتجاه الذي اخترته للشمال فانت من تقوم بتحديد اتجاه الشمال الافتراضي. * الرقم 2يمثل أحد الـصمامات الضوئية التي تشير إلى الاتجاه النشط. ويوجد أربع منها مخصصة للإتجاهات الأربعة (شمال، جنوب، شرق وغرب). * رقم 3 يمثل ناقل البيانات عن الاتجاه، وتم تغليفه لكي يحافظ على الاسلاك.
يجب ان تحافظ على وضع البوصلة بعيدا عن المحركات الكهربائية لأن هذه الأخيرة تحتوي على مغناطيسات قد تشوش على مجال البوصلة.
أما الصورة التالية فـتوضح الرسم التخطيطي للبوصلة من الداخل والدارة الكهربائية المرتبطة بها. |
|
|
|
|
|
|



الكاميرا
|
|
لا بد وانك سـتحتاج لكاميرا حتى ترى ما يرى الروبوت تحت الماء.
يمكنك استعمال قطعة معدنية داعمة للكاميرا عندما تريد تثبيتها داخل الروبوت. |
|
|
|
||
|
|
الصورة التالية توضح بطاقة للكاميرات اللاسلكية والتي يمكن شراؤها عبر الانترنت. |
|



الإضاءة

|
ولكي تعمل الكاميرا بشكل جيد وتنقل صورة واضحة لا بد من توفير الاضاءة اللازمة لها عن طريق بعض الوحدات الضوئية الكبيرة نسبيا في الطاقة الكهربائية والتي تصل إلى 3واط LED 3 WATT. |
|
|
|
يمكنك تصميم خشبة صغيرة أو قطعة بلاستكية وزينها كما تحب حتى تضع فوقها الصمام الضوئي.
يمكنك تثبيتها على قطعة من الألمنيوم قائمة الزاوية بالشكل الذي تراه في الصورة التالية. |
|
|
|
||
|
عند إضائتها في الظلام الدامس تبدو هكذا: |
||
|
|
|
|




دارة التحكم: الروبوت المائي
|
هناك العديد من الطرق التي من خلالها يمكنـك التحكم في المحركات السلكية واللاسلكية. غالبا ما قد يستخدم فيها الميكروكنترولر. يمكنك التعرف على الـمزيد من هذه الطرق وقد تم شرحها بالتفصيل هنا مثلا. |
|
|
ومن هنا ايضا شرح مفصل للطريقة السلكية واللاسلكية. بعد اتباع الدروس في الروابط ستصبح قادرا على صناعه متحكم كما في الصورة او يمكنك استخدام بطاقة Arduino. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|





الطاقة
|
لتوفير الطاقة اللازمة لتشغيل الروبوت سنقوم بوضع بطاريتين 12فولط في الجانب الذي لم نضع فيه شيء بفرض اننا وضعنا الكاميرا والمتحكم في الحركة في الأنبوبة التي في المنتصف. سنضع بطاريتان كل منهما في جانب لكي يحدث اتزان للروبوت تحت الماء. يستحسن شراء بطارية مناسبة الحجم كما في الصورة: |
|
|
|
يمكنك ايضا جعل مصدر الطاقة على السطح لتخفيف الوزن ولكن سيزداد عدد الاسلاك الواصلة للسطح ويزداد سمك سلك التوصيل وبالطبع في حاله التوصيل اللاسلكي لا مفر من وضع البطارية بالأسفل داخل انابيب الروبوت الجانبية. |

التحكم: جهاز التحكم عن بعد





الحبال
|
الصور التالية توضح كابلات التوصيل التي يمكن استخدامها وهي مقاومه للماء بالطبع: |





امتحان عمل الروبوت
|
طبعا اذا كنت ستستخدم التوصيل اللاسلكي فلا داعي لكل هذه التوصيلات، وهذه الصورة توضح الروبوت وهو جاهز للعمل والنزول للماء: |




الان اصبح لديك روبوت مائي جاهز ليبحر في المياه ويصور المياه مع اضاءة مناسبة.
تأليف
المؤلف: الصفحة الشخصية
ترجمة: محمد مختار (المنوفية - مصر)
{jumi [*3]}
المراجع
التعليقات
ولك جزيل الشكر
00697770043518
nagli_4ever