
أداة التحكم (مقبض الألعاب)
|
يتم التحكم بالغواصة عن طريق إرسال المعلومات المتعلقة بالإتجاه والسرعة والأوامر إليها على شكل رسائل مبنية على النظام الزوجي الرقمي (8أزواج). طريقة الإرسال تكون بشكل متتابع ومتتالي بمساعدة ميكروكنترولور من فئة PIC. وتحتاج الغواصة إلى تغذية كهربائية بمقدار 12فولط حتى تشتغل. |
اللوحة المتحكمة بالغواصة
|
العقل الإليكتروني لهذه اللوحة هو متحكم من فئة PICيتكفل باستقبال البيانات ويحولها إلى آوامر لتحريك الغواصة والتحكم بآلياتها. يمكن لهذه البطاقة من التحكم في ثلاث محركات للغواصة: محركين من أجل توجيهها يمينا ويسارا ومحرك ثالث الذي يعمل على رفع أو خفض الغواصة. والكاميرا تقوم بتصوير ما تجده الغواصة أمامها بمساعدة مصباح الإنارة الذي يعين على توضيح الصورة. |
الملفات الأساسية
|
قم بتحميل خطاطات الدارات الكهربائية وتصاميم البطاقات حتى تستعين بها لصناعة وحدتي التحكم: |
لا بد من قرائته
|
لصناعة البطاقات الإليكترونية بنجاح، المرجو الإطلاع على المقالات التالية ولو سريعا:
|



بطاقة مبرمجة
|
ستجد ملفات لشيفرات برمجية مصاحبة لهذا الموضوع، وستضطر لبرمجة العقول الإليكترونية للبطاقتين المذكورتين في هذا المقال عن طريق بطاقة مبرمجة، إذا لم تكن عندك واحدة فيمكنك صنعها بنفسك من خلال المقال التالي: |
الجزء الأول: أداة التحكم
الأجزاء الرئيسية
|
العربية الإنجليزية الفرنسية |
الكمية |
الرمز في الدارة الكهربائية |
الرمز أو القيمة |
|
المكثف Capacitor Condensateur |
1 |
C3 |
CAP, ELEC, 16V, 100uF |
|
2 |
C1, C2 |
CAP, 63V, 0.1uF |
|
|
المقاومة Resistor Resistance |
1 |
R5 |
RES, 330W, ¼W, 5% |
|
2 |
R3, R4 |
RES, 10KW, ¼W, 5% |
|
|
مقاومة متغيرة Potentiometer |
1 |
R1 |
5KW, Single Turn |
|
الترنزستور Transistor |
1 |
Q1 |
2N4401 (NPN) |
|
صمام ضوئي LED |
1 |
CR1 |
T1-3/4 Red Diff. |
|
مقبض تحكم صغير Mini Joystick |
1 |
R6 |
CTS Series 252 |
|
زر ضغط خاطف Momentary Push Button Bouton poussoir momentané |
1 |
PB1 |
C&K |
|
مقبس الميكروكنترولر Pin IC Socket |
1 |
U1 |
8Pin IC Socket |
|
الميكروكنترولر Microcontroller Microcontroleur |
1 |
U1 |
PIC12C671 (OTP) |
|
دارة حساسة للجهود الكهربائية الضعيفة Micropower Undervoltage Sensing Circuits |
1 |
U2 |
MC34164 |
|
معدل كهربائي Voltage Regulator Regulateur de tension |
1 |
U4 |
LM7805 (T0-92) |
الدارة الكهربائية
|
الدارة الكهربائية الخاصة بأداة التحكم هي كالتالي:
|
|
|

تصميم البطاقة
|
وتصميم الشريحة الخاصة بأداة التحكم هو كالتالي:
|
|
|

تموضع المركبات
|
الشكل التالي يبين تموضع المركبات الإليكتروينة على الشريحة:
|
|
|

تركيب
|
بالإستعانة على تموضع المركبات وطريقة إنجاز الشرائح الإليكترونية المذكورة في لابد من قرائته، ستكون النتيجة شبيهة بالتالي: |
|
|
|
نقوم بوضع البطاقة داخل صندوق مانع لتسرب الماء حتى تصبح أداة تحكم يدوي فعالة. انتبه إلى أنه يجب عليك إبراز مقبض التحكم وكذا الأزارار ومختلف مداخل ومخارج البطاقة من على وجه الصندوق وجانبه. |
|
|


البرمجة
|
تم برمجة العقل الإليكتروني لجهاز التحكم هذا بواسطة البرنامج MicroChip's MPLAB. قم بتحميل الشيفرة التالية الخاصة بهذه البطاقة من الرابط التالي:
ملاحظة: ستحتاج لبطاقة مبرمجة من أجل تحويل الشيفرة إلى ميكروكنترولور بطاقة أداة التحكم. ولقد أشرنا في الأعلى إلى بطاقة يمكنك صنعها بنفسك إذا لم تتواجد عندك واحدة. |
|
|

استعراض
إليك مقطعا مصورا يظهر عمل أداة التحكم مع روبوت آخر عندما تم الإنتهاء من صنعها:
الجزء الثاني: البطاقة المتحكمة بالغواصة
الأجزاء الرئيسية
|
العربية الإنجليزية الفرنسية |
الكمية |
الرمز في الدارة الكهربائية |
الرمز أو القيمة |
|
معدل كهربائي Voltage Regulator Régulateur de tension |
1 |
U6 |
LM7805 |
|
الترنزستور Transistor |
1 |
Q1 |
2N4401 (NPN) |
|
الصمام الضوئي LED |
1 |
CR1 |
T1-3/4 Red Diff. |
|
رنان سيراميكي Ceramic Resonator Résonateur céramique |
1 |
XT1 |
4.00MHz ZTT-4.00MG |
|
صمام ثنائي لتبديل كهربائي سريع High Speed Switching Rectifiers |
4 |
D1 |
1N4148 |
|
صمام شوتكي Schottky Diode Diode Schottky |
12 |
D2, D3, D4, D5, D6, D7, D8, D9, D10, D11, D12, D13 |
11DQ03 |
|
المرحل Relay Relais |
1 |
K1 |
2A, DPDT G6A-274P-ST-US |
|
المكثف Capacitor Condensateur |
1 |
C1 |
CAP, ELEC, 16V, 100uF |
|
3 |
C2, C3, C4 |
CAP, ELEC, 16V, 4700uF |
|
|
8 |
C5, C6, C7, C8, C9, C10, C11, C12 |
CAP, 63V, 0.1uF |
|
|
المقاومة Resistor Resistance |
1 |
R1 |
RES, 330W, ¼W, 5% |
|
2 |
R2, R3 |
RES, 10KW, ¼W, 5% |
|
|
Molex 2 pin Conn. Header |
5 |
J1, J2, J3, J4, J5 |
WM4200 |
|
Molex 2 pin Terminal Housing |
5 |
|
WM2000 |
|
3 pin Conn. Header |
1 |
J6 |
AMP |
|
Molex 3 pin Terminal Housing |
1 |
|
WM2001 |
|
Molex 4 pin Conn. Header |
2 |
J7, J8 |
WM4202 |
|
Molex 4 pin Terminal Housing |
2 |
|
WM2002 |
|
مقبس الميكروكنترولر Pin IC Socket |
1 |
U1 |
18 Pin IC Socket |
|
الميكروكنترولر Microcontroller Microcontrôleur |
1 |
U1 |
PIC16F84-04/P |
|
دارة حساسة للجهود الكهربائية الضعيفة Micropower Undervoltage Sensing Circuits |
1 |
U2 |
MC34164 |
|
كنترولور المحرك Motor Driver IC Contrôleur du moteur |
3 |
U3, U4, U5 |
L298N |
بطاقة المستشعر
|
هذا تصميم لبطاقة مستشعر الماء |
|
|
|
|
||
|
الدارة الكهربائية |
تصميم البطاقة |
تموضع المركبات |



الدارة الكهربائية العامة للغواصة
|
الدارة الكهربائية الخاصة باللوحة الأم للغواصة هي كالتالي (يمكنك أن تراها بشكل أكبر إذا قمت بتحميلها من ملفات البطاقة): |
|
|

تصميم البطاقة المتحكمة بالغواصة
|
وتصميم الشريحة هي كالتالي:
|
|
|

تموضع المركبات في البطاقة المتحكمة بالغواصة
|
الشكل التالي يبين تموضع المركبات الإليكتروينة على الشريحة:
|
|
|

تركيب
|
بالإستعانة على تموضع المركبات وطريقة إنجاز الشرائح الإليكترونية المذكورة في لابد من قرائته، ستكون نتيجة شبيهة بالتالي. هذه الصورة هي لبطاقة المستشعر. |
|
|
|
أما التالية فهي اللوحة المتحكمة بالغواصة. |
|
|
|
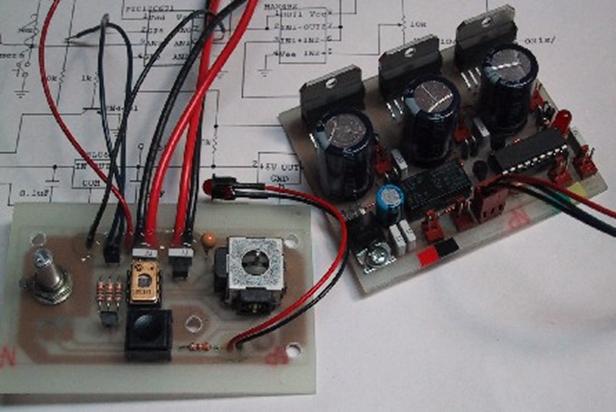
الصورة التالية تبين مقارنة لبطاقة الغواصة على اليمين وبطاقة أداة التحكم على اليسار. وهما بحجم متساو تقريبا. |
|
|
|
أهم شيء بعد التركيب الكلي للغواصة وأداة التحكم هو إيصال أداة التحكم بكابل طويل بقلب الغواصة المتمثل قي لوحتها الإليكترونية. لكن قبل هذا يمكنك إيصال المحركات والكاميرا والمصباح باللوحة الأم للغواصة وتمتحن عملها عن طريق أداة التحكم قبل أن تضعها داخل الغواصة. |
|
|



البرمجة
|
تم برمجة العقل الإليكتروني للوحة الأم للغواصة الروبوتية بنفس البرنامج MicroChip's MPLAB. قم بتحميل الشيفرة التالية الخاصة بهذه البطاقة من الرابط التالي:
ملاحظة: ستحتاج لبطاقة مبرمجة من أجل تحويل الشيفرة إلى ميكروكنترولور بطاقة أداة التحكم. ولقد أشرنا في الأعلى إلى بطاقة يمكنك صنعها بنفسك إذا لم تتواجد عندك واحدة. |
تأليف
المؤلفين: o8-Ball Engineering
ترجمة بتصرف: محمد السهلي
{jumi [*3]}
المراجع
http://www.ece.uvic.ca/~elec499/2001a/group11/ROV%20Controller/ROV_design.htm
http://www4.rgu.ac.uk/eng/robotics/page.cfm?pge=8192